- DC: The DC generator/motor has the problem of the efficiency and the pads wear, due to is brushed but very easy to make motor, due to only need a voltage.
- AC synchronous Is the best generator and the most efficiency, but have the problem of the synchronism, due to rpm of axis rotation is relation with the AC frequency.
How it works AC synchronous generator/motor
This is based in magnetic induction, and if we take the effect far as we are interested we have:

kv value is a function of the construction of synchronous machine. Normally the synchronous machine is triphasic, and it works with three phases and with a offset between phases of 120º degrees.

where:
- a is a amplitude (it is 2E in the last formula)
- b is a period, and it is depending of rpm
The machine generator through to motor if with the same signal that it creates for the machine, the E applied in the wires is higher than the generate by machine.
The synchronous machine have a several poles and coils, but if we have the triphasic, we have several coils that the induced current is equal.

If we compare with a batteries each coil, we can to make two type of connection, serial or parallel
- Serial increase the voltage but keep the current
- Parallel increase the current but keep the voltage

Normally for us it is more interest serial and increase the Voltage due to the wires have a internal impedance and the losses per heat are depending of the current that it pass through the wires, and the coils is assembled per long wires, therefore is more interested we have more voltage and less current.

The problem is if the voltage need more insulate and if we want to use like a engine, we need create higher voltage than the internal create per the synchronous machine.
AC generator
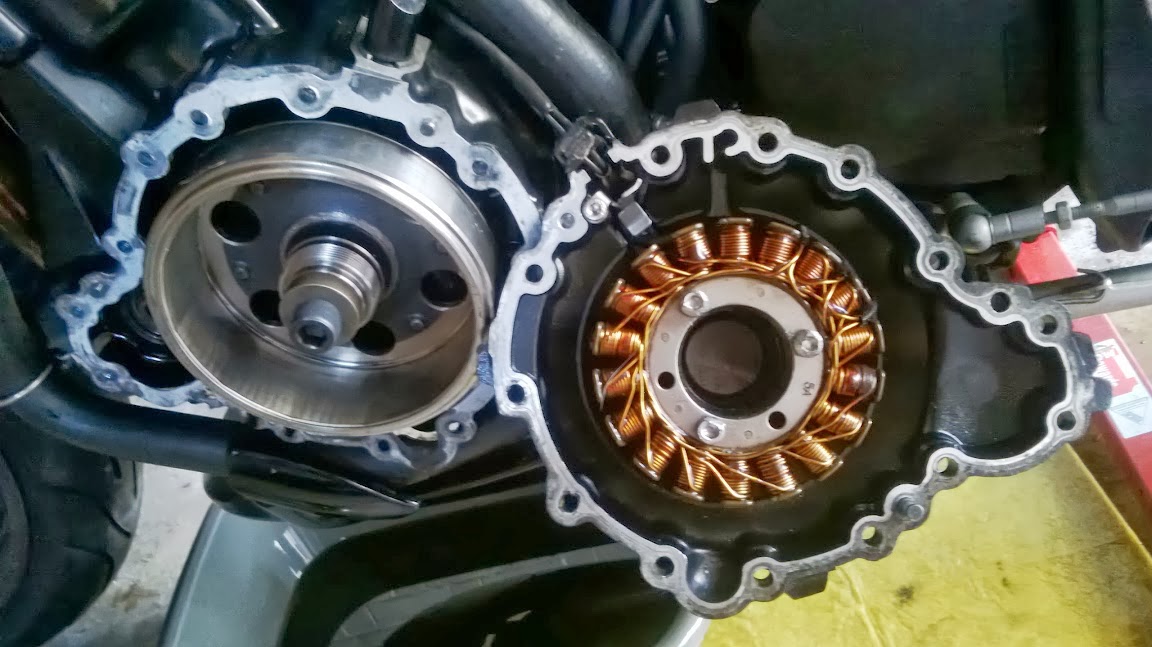
The typical construction is the coils in the stator and the magnet in the rotor, and with ne new magnets of rare-earth metals such as Neodymium
In this case if we have a high voltage is no problem cue to we can down the voltage with regulators, and theses are very simple and cheap to make.
In the motorbike the generator is fixing to crankshaft normally.
For example the stator of 675cc engine of Triumph have a stator with 18 coils, arranged into 3 phases, and provide 30VAC minimum to 4000rpm. If we see kv value is 133, but for experience the good status of the the 30VAC is near to 2000rpm, therefore kv is near of 65, and near of 200W of Power.
AC engine
The synchronous machine as engine is the more efficiency machine and the most efficiency engine, (near of 95%), but it have two problems.
- All voltages must be synchronous with the position of the rotor and the induction of the coils.
- The maximum voltage to maximum rpm speed must be less voltage than the battery voltage
The problem of the voltages that it must be synchronous with the position of the rotor and the induction of the coils, it is solved by electronics, with the ESC (Electronic Speed Controller)

The circuit for one control of Brushless that I found in the web DIY Electric Car, Masina electrica ro

The voltage level is solve with the coils put in parallel, this increase losses in the wire, and down the efficiency, but it allow used a lot of batteries with low voltages.
This machine as a engine usually have a kv near of 1000, or more. The NTM Prop Drive Series 42-38 is a example with 750kv, Power 785W with 14.4V.


Synchronous Machine Generator/Motor
The best option is simulate the electronic gear box, where change the kv of machine, with the change the connection between coils and the batteries.
The Turnigy AquaStar T20 3T 730KV/1280KV Water Cooled Brushless Motor have the group of coils separated in A, B and C, and we can connect the coils in Y or Δ (V(Y)=1.73·V(Δ)).
- Y provide kv = 730
- Δ provide kv = 1280
Above of low rpm the connection of the coils are Y and when increase the rpm change the connection to Δ, for keep the voltage into of range.
Also it could use like:
- Y as generator.
- Δ as engine.
And the batteries don't have change the connection because the level of the voltage change by coils connection


In the Turnigy AquaStar T20 3T, we can see that we have limit the voltage near of 12V

But if use the usually kv for stator we have for example kv = 150 and the chart show that the limit of the voltage near of the 60V

If do to combine with the batteries or coils interchange connection serial / parallel, we can control for example, Stop and go, y the city with and save fuel and keep the temperature of the engine into of ranges, and part of low speed in electrical impulse, therefore with the save fuel, and creates the more efficiency combi-engines, electrical/gasoline, without a significant weight increase.
Other chances of system is we could to use in city circulation, when we are stop in the rush hour and the motorbike engine heat is increase, this system can to use as Stop and Go such as Audi or BMW, with several advantages:
- Save fuel.
- No bendix mechanism and no wear.
- Keep the temperature into range.
In summer in the midday, in warm countries, into of the rush hour, several motorbikes stop inthe side of the roads due to the stop the engines by temperature, due to ECU cut off the engine to safeguard. This is normally in the stops and traffic lights.
Honda works in a new engine eSP for next-generation engines 125cc, and this engine use a this concept in their technology.